English
English
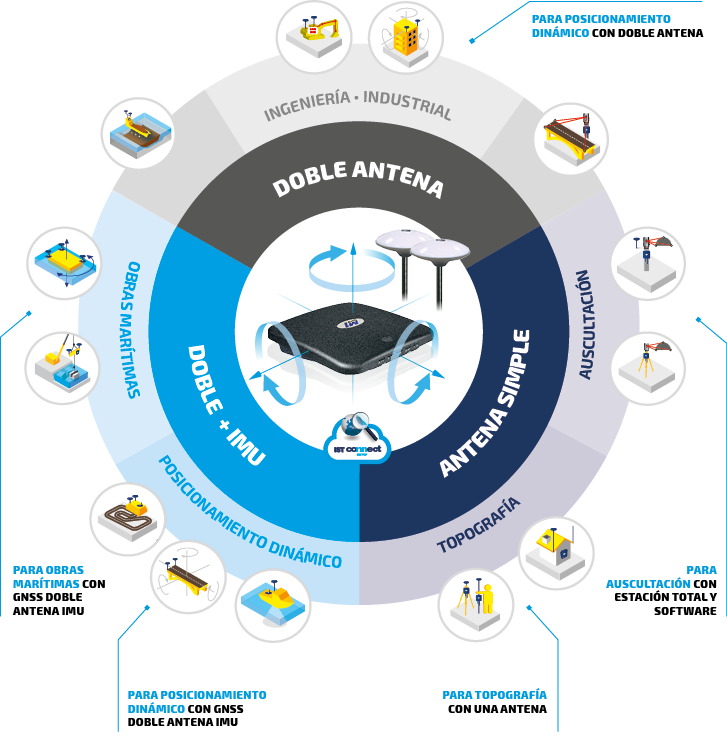
Topografía

MODO BASE. Montado sobre un trípode le permite trabajar en modo base, desde donde transmite las correcciones diferenciales a través de su radio integrada o bien a través de Internet con protocolo NTRIP.

MODO BASE INFRAESTRUCTURAS. Si necesita una base de referencia permanente transmitiendo 24/7, puede configurar el equipo con una base de infraestructura. Esto le permitirá transmitir correcciones vía radio, Internet o a un servidor central para poder controlar múltiples estaciones y también gestionar el almacenamiento de datos para realizar postproceso.
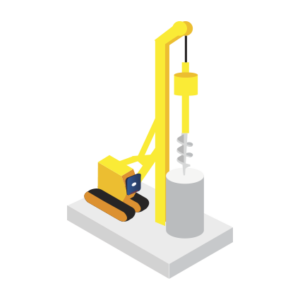
Industrial

APLICACIONES DE POSICIONAMIENTO. Para ubicación de vehículos con el envío de datos de posición y la recepción de correcciones diferenciales RTK. Salida de datos específica para las necesidades del proyecto y con cálculos de proyección de la posición del vehículo sobre el eje del circuito.


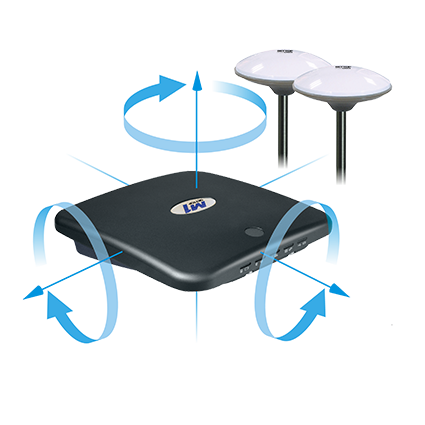
CONTROL DE MAQUINARIA 2D/3D. Amplia las posibilidades en diferentes tipos de aplicaciones: control de maquinaria, orientación, dragado, gánguil (barcos), posicionamiento de plataformas, etc. Settop M1 CAN BUS le permite la sincronización de sensores externos, el uso de hasta dos antenas GNSS e incrementa el número de puertos COM (RS232, USB) Ethernet y control de alimentación. Puede ser configurado fácilmente vía Internet.
Settop Neptune para Obras Marítimas
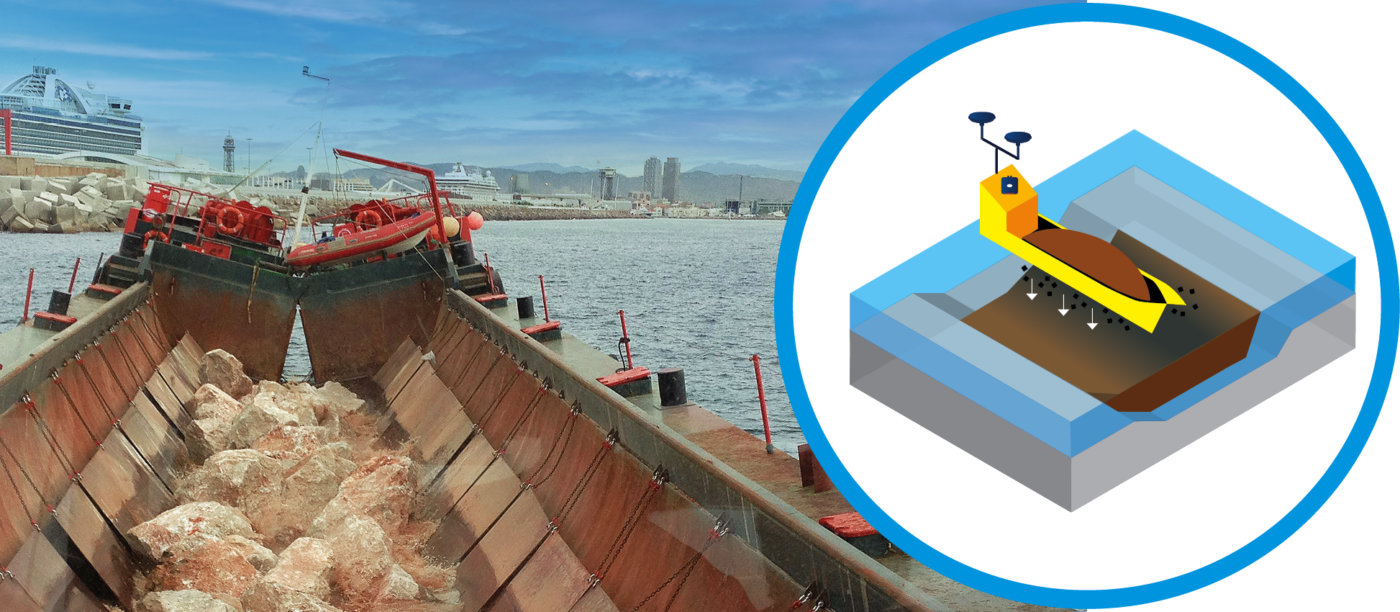
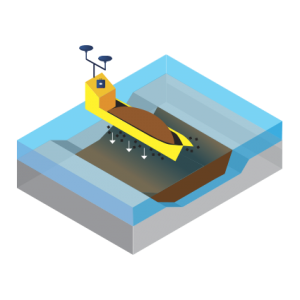
SISTEMA DE GUIADO PARA VERTIDOS. La instalación de un receptor GNSS con doble antena nos permite saber en todo momento la posición del gánguil y su orientación para poder encarar el vertido en la posición correcta. El software registra la ubicación de los vertidos realizados y el número de ellos, pudiendo controlar en todo momento el volumen total de material vertido.

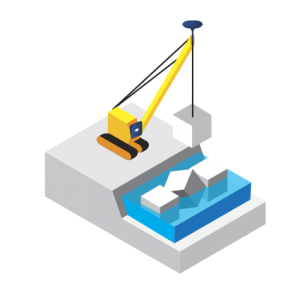
SOLUCIÓN DE GUIADO DE GRÚA PARA POSICIONAMIENTO PRECISO DE BLOQUES. Con su sistema de localización continuo y gracias a su práctico visualizador, el operario conocerá en todo momento la posición, profundidad y orientación del bloque y será capaz de situarlo con absoluta precisión sobre el plano del proyecto, generando un informe con todos los datos útiles de la posición definitiva.

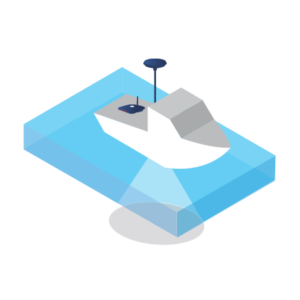
SISTEMA DE CONTROL BATIMÉTRICO. Levantamiento del relieve de superficies subacuáticas, fondo del mar, cursos de aguas, lagos, embalses… cartografía de los fondos, como si se tratara de un terreno seco. Al igual que en los levantamientos convencionales, se hallarán las coordenadas (X, Y, Z), de manera que puedan describirse los fondos y todas aquellas anomalías que en ellos puedan existir.
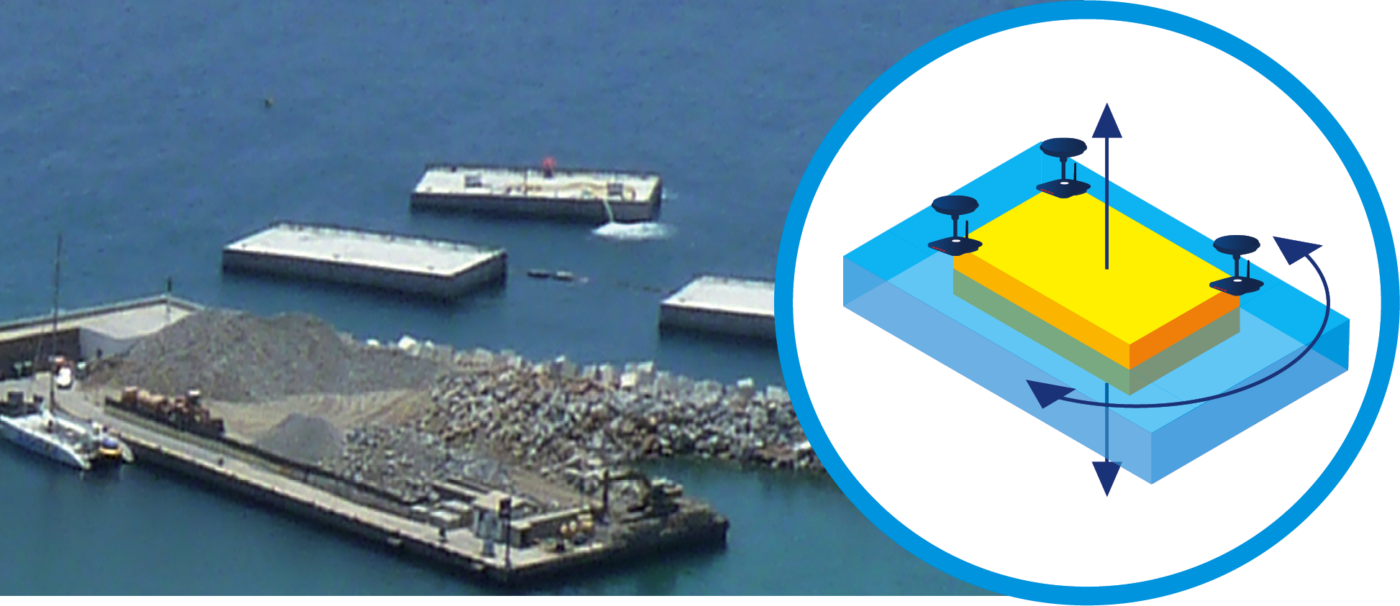
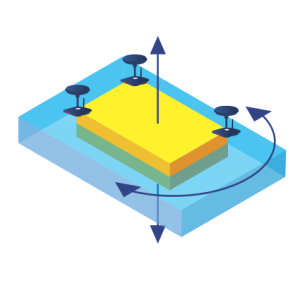
SISTEMA DE POSICIONAMIENTOS DE CAJONES FLOTANTES DE HORMIGÓN. Recepción de datos de tres receptores GNSS con el que se controla la ubicación del cajón flotante en 3 dimensiones para su correcta ubicación y nivelado. Permite guiarle en el proceso de nivelado de la plataforma, el posicionamiento exacto en relación al proyecto y el chequeo de éstos una vez ubicados.
Auscultación

MONITORIZACIÓN DINÁMICA/ESTÁTICA CON GNSS (BLOQUES, ESTRUCTURAS). Este tipo de monitorización se usa para el control de posicionamiento o verificación de desplazamiento de grandes estructuras. Un ejemplo de este tipo de monitorización es el control de presas, edificios, taludes, etc.

MONITORIZACIÓN DINÁMICA (PUENTES, PLATAFORMAS). Este tipo de monitorización se usa para el control de posicionamiento de elementos móviles que deben ser ubicados en lugares concretos definidos en el proyecto. El empuje de puentes es un claro ejemplo de monitorización dinámica.

MONITORIZACIÓN ESTÁTICA CON ESTACIÓN TOTAL (TALUDES, EDIFICIOS, ESTRUCTURAS). Este tipo de monitorización se usa para el control de deformaciones y/o movimientos de elementos estáticos como son taludes, edificios, estructuras, etc.

MONITORIZACIÓN CON GNSS Y ESTACIÓN TOTAL. La combinación de diversos sensores de posicionamiento como estaciones totales, GNSS y sensores adicionales nos pueden proporcionar datos para realizar un estudio sobre la estabilidad de una zona concreta.